State of the art 1980s
Back in the late 80’s computers were slow, electronics was big, and walking machines were in their infancy. The biped you see below was built for my PhD project at Cardiff University. I did the design and most of the programming and the construction was a team effort; Dave Hobbs and Bob Jones on the left of the picture machined the metalwork, Dave England designed and built the microprocessor boards, and I (on the right with the hair) put it all together.
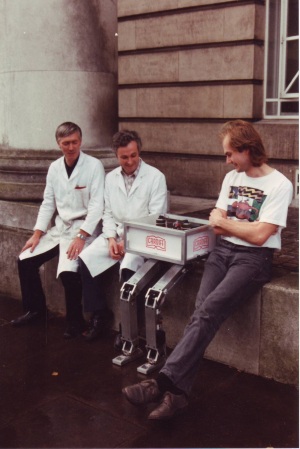

The result was a heavy shuffling thing with eight joints driven by bulky electric motors, connected to a big rack of amplifiers and computer boards. However it did work after a fashion; it could stand up, lean over, adapt to ground that wasn’t level and walk slowly without falling over. Sadly there are no videos left of the machine which are of good enough quality to show here.
A lot of lessons were learnt from the project, the most important being that
- building any kind of robot takes a huge amount of effort,
- building a bipedal machine that works as well as a person is extraordinarily difficult,
- building such a large and heavy machine is not a good idea because it is very scary when it loses control.
Specifically, there were three things severely limiting the performance of the biped. First, the machine was too heavy with most of the weight coming from the motors and gearboxes. Bear in mind that during some movements one motor has to support the weight of the entire machine. Second, the sensors were not good enough. The biped used sensors on the joints to measure angle, and sensors in the feet to measure forces. What was missing was any kind of inner-ear equivalent such as gyroscopes and accelerometers. These were not available at sensible prices back in the 80s. Finally, the computers were just too slow. There was a small microprocessor for each joint and a faster one controlling motion of the whole machine, but these were really slow by today’s standards.
Biped revisited
Twenty years later technology has moved on. Electric motors are now much lighter due to the availability of precious metal magnets, cheap gyroscopic sensors and accelerometers are available thanks to phone and remote control technology, and computers are much smaller and more powerful. Consequently, I have decided to have another go.

The new biped is much smaller and lighter and based around a different kind of electric motor called a tubular motor. This is the same kind of motor as used on the hopper, giving the advantages of direct linear motor and high power to weight ratio. Unfortunately, these motors have to be built by hand and the funny looking black cylinders that you see forming the muscles of the machine in the photo are the motors before the copper windings have been added.
The new biped has ten powered joints, allowing it to balance and move both forward and backward and from side to side. Each joint motor will be controlled by its own microprocessor board (tubular motors are not straightforward to control) and the whole machine will probably be driven by a miniature PC, allowing all of the electronics to be carried onboard.
The new biped is a long term project and is not expected to be working any time soon.